MIRR: Mobile Interactive Responsive Reflector
Project Credits: LMN (Team: Plamena Milusheva, Scott Crawford, Jack Chaffin)
Photo and Video Credits: LMN/ Enol Vallina/ Adam Hunter
WORKFLOWS
Rhino/Grasshopper
Python
Kinect II
RhinoCAM/CNC mill
laser cutter
MIRR (Mobile Interactive Responsive Reflector) is designed to activate the spaces in which it is installed by engaging with people walking by. Unsuspecting people passing by the installation trigger it with their presence, at which point it begins to track their movement by turning its mirrored panels. People can also engage with the piece more directly using a wirelessly connected button box.
MIRR is an opportunity to study how people engage with environments that can respond to them and change based on that interaction. It is the next development in our studio’s research into responsive and adaptive systems. We have been exploring a range of network and interaction types in the form of large prototypes as a way to understand the potential for intelligent responsive systems within buildings.
Building a prototype at this scale challenges me as a designer to work through a number of potential constraints as well as engage with some of the latest technology while also being able to study human behavior in relation to such systems. As the technologies and tools to build smarter environments become better and more readily available we can engage with them through installations in order to explore how these systems might communicate, respond to external and internal inputs, and allow for buildings to adapt to a range of short and long-term conditions as well as engage with their inhabitants.



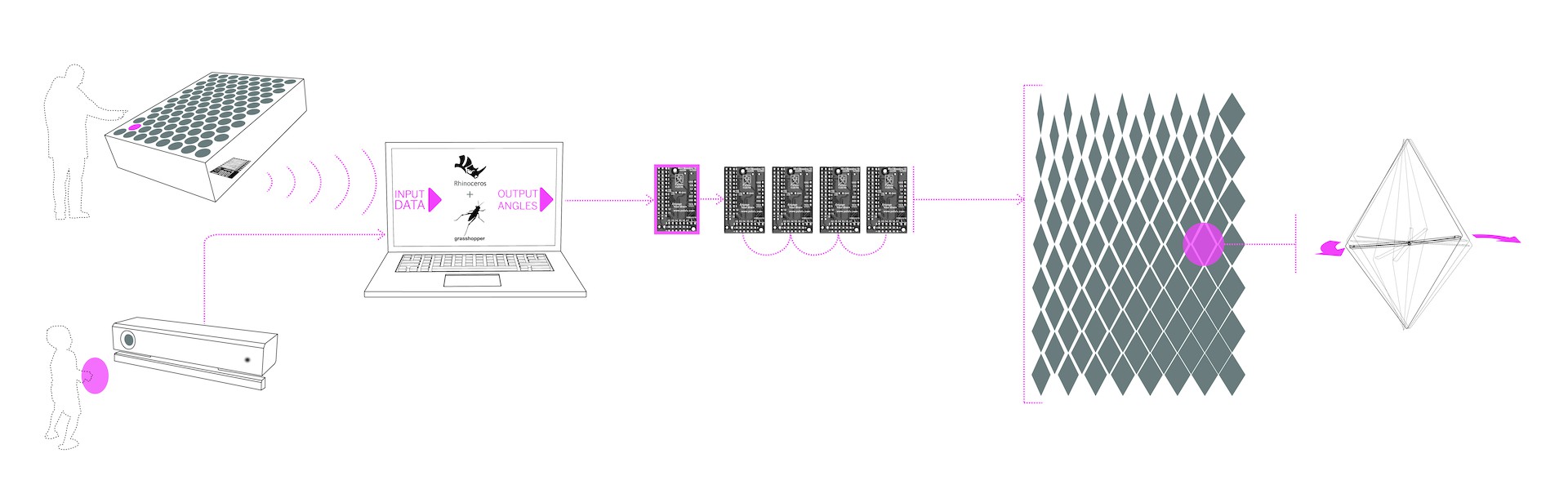
The primary research focus for MIRR was to develop a workflow between our standard digital design tools, Rhino/Grasshopper, and the physical environment. We wanted to be able to collect data from the real world (via a Kinect II or the custom button box), use it as a point input to generate and visualize changes in geometry, and collect and output those changes as data to drive physical components (via 98 individually controlled servos).








All parts of the system were fabricated in-house. We were able to move through two iterations of the installation, with the second one allowing us to address significant physical engineering issues as well as software/hardware challenges discovered through the first iteration. The second iteration was optimized for fast assembly/disassembly and portability.




